 English
English العربية
العربية Български
Български 中文(漢字)
中文(漢字) Čeština
Čeština Dansk
Dansk Eesti keel
Eesti keel Suomi
Suomi Français
Français Deutsch
Deutsch Ελληνικά
Ελληνικά עברית
עברית Magyar
Magyar Bahasa Indonesia
Bahasa Indonesia Italiano
Italiano 日本語
日本語 한국어
한국어 Latīna
Latīna Latviešu valoda
Latviešu valoda Lëtzebuergesch
Lëtzebuergesch Polski
Polski Português
Português Română
Română Русский
Русский Slovenščina
Slovenščina Español
Español Svenska
Svenska ภาษาไทย
ภาษาไทย Tiếng Việt
Tiếng Việt
VOI (Ohjaimen alueverkko) on usean isäntäverkon sarjaliikenneprotokolla, jonka saksalainen Bosch-yhtiö on kehittänyt 1980-luvun alussa ratkaisemaan lukuisten elektronisten ohjausyksiköiden välisen tiedonvaihdon ongelmat. (ECU:t) nykyaikaisissa autoissa.
Boschin ja Intelin yhdessä kehittämä vuonna 1983;
1987 Ensimmäinen CAN-ohjainpiiri (Intel);
1990 Ensimmäinen CAN:ia käyttävä massatuotantoauto: Mercedes S-sarja;
VOI 2.0 vapautettiin sisään 1991 (OSA A ja OSA B);
sisään 1993, CANista tuli ISO-standardi (ISO 11898);
Monet opiskelijat pyörtyivät nähdessään tämän nimen. Itse asiassa, CAN-viestintä voidaan ymmärtää yksinkertaisesti neuvottelupuheluksi. Kun yksi henkilö puhuu, muut kuuntelevat (lähetys). Kun useat ihmiset puhuvat samaan aikaan, Tiettyjä sääntöjä käytetään päätettäessä, kuka puhuu ensin ja kuka viimeisenä (välimiesmenettely). Tämä on kuin sinä ja johtaja puhuisitte samaan aikaan kokouksessa. Annat ehdottomasti johtajan puhua ensin.
Mutta se on syytä huomata tässä kokouksessa, puhuja vahvistaa, onko kuuntelija vastaanottanut tiedon onnistuneesti. Jos puhujan antamat tiedot ovat virheellisiä, kuuntelija huomauttaa virheestä ajoissa.
CAN-väylän liittimen vastuksen havaitseminen
Yleismittarin CAN-väylän tunnistus
CAN-väylän tunnistusmenetelmä:
① Ennen tietoväyläjärjestelmän tarkistamista, tulee varmistaa, että kaikissa dataväylään kytketyissä elektronisissa ohjausyksiköissä ei ole toimintahäiriöitä. Toiminnallisella vialla tarkoitetaan vikaa, joka ei suoraan vaikuta tietoväyläjärjestelmään, mutta vaikuttaa tietyn järjestelmän toimintaprosessiin. Jos anturi on vaurioitunut, seurauksena on, että lähettimen signaalia ei voida siirtää dataväylän kautta. Tämä toimintahäiriö vaikuttaa epäsuorasti tietoväyläjärjestelmään, vaikuttaa kommunikointiin elektronisten ohjausyksiköiden välillä, jotka vaativat signaaleja tältä anturilta. Jos on toiminnallinen vika, vika pitäisi ensin poistaa. Merkitse vika muistiin ja poista kaikki vikakoodit elektronisesta ohjausyksiköstä.
② Kaikkien toimintahäiriöiden poistamisen jälkeen, jos tiedonsiirto elektronisten ohjausyksiköiden välillä on edelleen epänormaalia, tietoväyläjärjestelmä on tarkistettava. Kun tarkistetaan dataväyläjärjestelmän vikoja, seuraavat kaksi mahdollista tilannetta on erotettava toisistaan: ■ Kaksijohtimisen tietoväyläjärjestelmän tunnistus, joka koostuu seuraavista: 2 elektroniset ohjausyksiköt. ■ Tunnista kaksijohtiminen dataväyläjärjestelmä, joka koostuu 3 tai useampia elektronisia ohjausyksiköitä.
③ Jos laitteistovaurion syytä ei löydy tietoväylästä, kannattaa tarkistaa, aiheuttaako jokin elektroninen ohjausyksikkö vian. Irrota kaikki elektroniset ohjausyksiköt, jotka lähettävät tietoja CAN-väylän kautta, sammuta virtalukko, ja kytke yksi elektronisista ohjausyksiköistä. Esimerkiksi, Volkswagen-järjestelmämalleille, kytke vikadiagnoosilaite, käännä virtalukko päälle, ja poista juuri kytketyn elektronisen ohjausyksikön vikakoodi. Käytä toimintoa 06 lopettaaksesi lähdön, kytke virta-avain pois päältä ja päälle, käännä virtalukko päälle 10 sekuntia ja käytä sitten vianmääritystyökalua lukeaksesi juuri kytketyn elektronisen ohjausyksikön vikamuistin sisällön. Jos näyttöön tulee "laitteistovaurio"., vaihda juuri liitetty elektroninen ohjausyksikkö; jos "laitteistovaurio" ei näy, kytke seuraava elektroninen ohjausyksikkö ja toista yllä oleva prosessi.
CAN-väylän yleisiä vikoja ja syitä:
(1) CAN-väylän yleisiä vikoja CAN-väylän elektronisessa ohjausyksikössä, väylävirhetietueita voi olla kaksi: CAN-tiedonsiirtovika ja CAN-väylän linjavika.
① CAN-tiedonsiirtovika On olemassa kaksi tapaa, joissa tiedonsiirto epäonnistuu: ■ Elektroninen ohjausyksikkö on avoin piiri. ■ Elektroninen ohjausyksikkö on vaurioitunut.
② CAN-väylälinjan vika CAN-väylälinjan vikaantumistilanteet ovat seuraavat:
■ CAN-väylän oikosulku.
■ Yksi CAN-väylän johto on katkennut.
■ CAN-väylän johto on maadoitettu.
■ Katko CAN-väylän johtojen välillä.
■ Ristikytkentä CAN-Low- ja CAN-High-linjan välillä.
■ CAN-Low-linja on oikosuljettu akun positiiviseen napaan.
■ CAN-High-linja on oikosuljettu akun positiiviseen napaan.
■ CAN-Low-linja on oikosuljettu akun negatiiviseen napaan.
■ CAN-High-linja on oikosuljettu akun negatiiviseen napaan.
(2) CAN-väylän vikojen syyt CAN-väylän tietoliikennehäiriöiden syyt ovat seuraavat:
① CAN-Low- tai CAN-High-linjan tiedonsiirtolinja on auki tai oikosulussa. ② Pistokeliitäntä on vaurioitunut, kuten vaurioituneet kontaktit, lika, ja ruostetta. ③ Jännitehäiriö ajoneuvon sähköjärjestelmässä, kuten vaurioituneen sytytyspuolan tai maadoitusliitännän aiheuttama. ④ Elektronisen ohjausyksikön tiedonsiirtokomponentti vioittuu. ⑤ Sähkönsyöttöhäiriö elektronisessa ohjausyksikössä. Kun akku on melkein tyhjä, akun jännitteen hidas pudotus voi aiheuttaa vikatietueen tallentumisen, koska kaikki elektroniset ohjausyksiköt eivät sammu samaan aikaan jännitehäviön vuoksi.
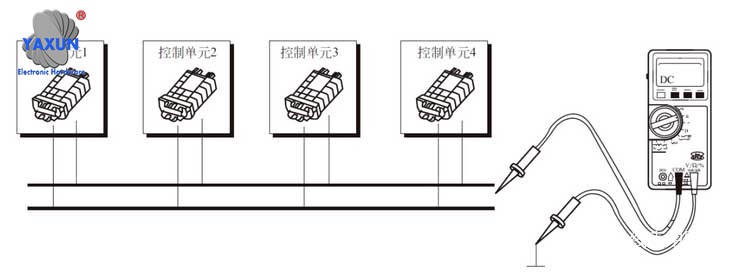
Oikosulku CAN-väylässä positiiviseen napaan, oikosulku maahan, ja johtojen oikosulku toisiinsa eivät vahingoita elektronista ohjausyksikköä, mutta vakavimmassa tapauksessa, se aiheuttaa väyläjärjestelmän toimintahäiriön. Ajoneuvon väyläjärjestelmä ei ole alttiina vain avoimelle virtapiirille tai oikosulkuvirheille. Kun vesihöyry tunkeutuu väyläjärjestelmän pistokkeisiin, kosketusvastus voi ilmaantua maan väliin, plusnapaiset ja CAN-väylän johdot, saa väyläjärjestelmän toimimaan epänormaalisti. CAN-väylän yleismittarin tunnistusmenetelmä CAN-väylä voi käyttää digitaalista yleismittaria jännitesignaalin testaamiseen, jotta voidaan karkeasti määrittää, onko dataväylän signaalinsiirrossa vika. Havaitsemismenetelmä on esitetty alla olevassa kuvassa:
▲ CAN-väylän yleismittarin tunnistus
Kun mitataan taajuussignaaleja digitaalisella yleismittarilla, Yleismittarilla on segmentoidun hankinnan ja tehollisen arvon laskennan toimintaominaisuudet. Siksi, digitaalisen yleismittarin näyttöarvo voi heijastaa vain mitatun signaalin pääsignaalijännitearvoa, eikä se voi näyttää kaikkia mitatun signaalin yksityiskohtia. Voidaan nähdä, että kun digitaalista yleismittaria käytetään mittaamaan CAN-väylän signaalijännitettä, Yleismittarin näyttöarvon ja CAN-väylän pääsignaalijännitearvon välillä on vastaava suhde.
(1) Käytä yleismittaria mittaamaan CAN-väylän teho
CAN-High-signaalin jännite on noin 2,5 V väylän ollessa tyhjäkäynnillä. Kun väylällä on signaalinsiirto, jännitearvo vaihtelee korkealla taajuudella välillä 2,5–3,5 V, joten CAN-Highin päärungon jännitteen tulisi olla 2,5 V, joten mitattu arvo yleismittarilla mitattuna on 2,5 ~ 3,5 V, joka on suurempi kuin 2,5 V, mutta lähellä 2,5 V. Samoin, CAN-Low-signaalin jännite väylän ollessa tyhjäkäynnillä on noin 2,5V. Kun väylällä on signaalinsiirto, jännitearvo vaihtelee korkealla taajuudella välillä 1,5–2,5 V, joten CAN-Highin pääjännitteen tulisi olla 2,5 V, joten mitattu arvo yleismittarilla mitattuna on 1,5 ~ 2,5 V, joka on alle 2,5 V mutta lähellä 2,5 V.
(2) Käytä yleismittaria Comfort CAN -väylän mittaamiseen
Comfort CAN:n signaalin jännite on noin 0 kun bussi on tyhjäkäynnillä. Kun väylällä on signaalinsiirto, jännitearvo vaihtelee suurella taajuudella välillä 0 ja 5V. Siksi, CAN-Highin päärungon jännitteen tulee olla 0, joten mitattu arvo yleismittarilla mitattuna on noin 0,35V. Samoin, CAN-Low-signaalin jännite on noin 5 V väylän ollessa tyhjäkäynnillä. Kun väylällä on signaalinsiirto, jännitearvo vaihtelee suurella taajuudella välillä 0 ja 5V. Siksi, CAN-Highin pääjännitteen tulee olla 5 V, joten mitattu arvo yleismittarilla mitattuna on noin 4,65 V.
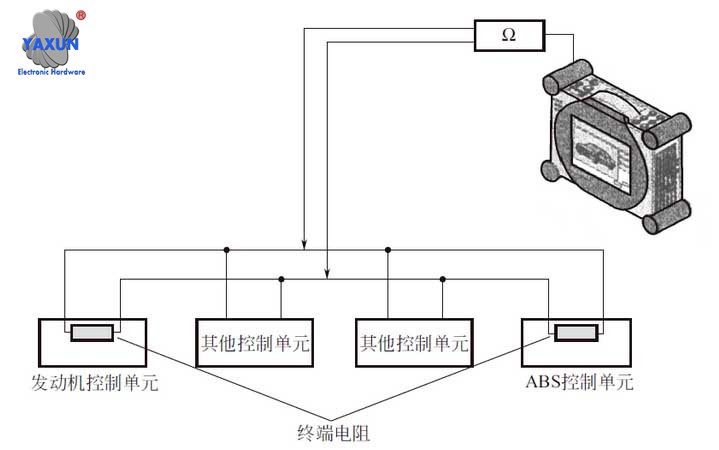
(3) CAN-väylän liittimen vastuksen havaitseminen
Kahden päätevastuksen kokonaisresistanssin mittaamiseksi, voit käyttää VAS5051-ilmaisimen yleismittaritoimintoa suorittaaksesi testin alla olevan kuvan mukaisesti.
▲ Mittaa kahden napavastuksen kokonaisresistanssi. Päätevastusten mittausvaiheet ovat seuraavat:
① Irrota johdot (kaapelit) akun positiivisista ja negatiivisista navoista. ② Odota noin 5 minuuttia, kunnes kaikki kondensaattorit ovat täysin tyhjät. ③ Liitä VAS5051-ilmaisin, kutsu yleismittaritoimintoa, liitä mittausjohdot, mittaa liitinvastuksen kokonaisresistanssi ja kirjaa se muistiin. ④ Irrota johtosarjan pistoke, jossa on liitinvastuksen elektroninen ohjausyksikkö (kuten moottorin elektroninen ohjausyksikkö) ja tarkkaile, muuttuuko päätevastuksen kokonaisresistanssi. ⑤ Liitä ensimmäisen elektronisen ohjausyksikön johtosarjan pistoke (päätevastuksen kanssa, kuten moottorin elektroninen ohjausyksikkö); irrota sitten toisen elektronisen ohjausyksikön johtosarjan pistoke (kuten ABS elektroninen ohjausyksikkö). Tarkkaile, muuttuuko liitinvastuksen kokonaisresistanssi. ⑥ Analysoi mittaustulokset. Se, mikä on asetettu elektroniseen ohjausyksikköön, ei ole liitinvastus, jolla on kiinteä vastus, vaan useiden mitattujen vastusten yhdistelmä. Esimerkiksi, 1.9TDI-mallissa pumppusuutinyksiköllä, moottorin elektroninen ohjausyksikkö on varustettu 66Ω liitinvastuksella. Päätevastus on suunniteltu ajoneuvomallin mukaan, ja kokonaisvastusarvo riippuu ajoneuvon väylärakenteesta. Kokonaisvastuksen mittauksen jälkeen, sinun on irrotettava pistoke, jossa on terminaalivastuksen elektroninen ohjausyksikkö ja mitattava yksilöllinen vastus kahdesti. Kun mitattu resistanssiarvo muuttuu elektronisen ohjausyksikön poistamisen jälkeen, se tarkoittaa, että molemmat vastusarvot ovat normaaleja. Taajuusmuuttajan CAN-väylään asennettu liitinresistanssi voidaan mitata yleismittarilla, mutta Comfort-CAN-väylään ja tieto-CAN-väylään asennettua liitinresistanssia ei voi mitata yleismittarilla. Esimerkiksi, ota malli Audi A21.4 esimerkkinä analysoidaksesi sen CAN-väylän kokonaisvastusta. Kaksi elektronista ohjausyksikköä, joissa on liitinvastukset, on yhdistetty CAN-väylän johtosarjalla, ja kaksi päätevastusta on kytketty rinnan väylään. Mittaustulos on, että kunkin napavastuksen resistanssi on noin 120Ω, ja kokonaisvastus on noin 60Ω. Tästä mittaustiedosta, voidaan päätellä, että CAN-väylää ohjaava terminaalivastus on normaali. On huomattava, että yhden napavastuksen resistanssi ei välttämättä ole noin 120Ω, ja sen ominaisarvo vaihtelee väylärakenteesta riippuen.
Toinen esimerkki on Audi A21.4 -mallin CAN-väylän yksittäisen vastusarvon analysointi. Kokonaisvastuksen mittauksen jälkeen, irrota sähköisen ohjausyksikön johtosarja, jossa on päätevastus, ja mittaa sitten uudestaan. Tällä hetkellä, näytöllä näkyvän vastuksen arvon pitäisi muuttua (tämä on elektronisen ohjausyksikön liittimen vastuksen arvon mittaus, ja CAN-väylää ohjaavan yksittäisen terminaalivastuksen todellinen mitattu resistanssiarvo). Jos mitattu resistanssiarvo ei muutu päätevastuksella varustetun elektronisen ohjausyksikön johtosarjan pistokkeen irrotuksen jälkeen, järjestelmässä on ongelma. Saattaa olla, että irrotetun elektronisen ohjausyksikön liitinvastus on vaurioitunut, tai CAN-väylässä on avoin piiri. Jos näytössä oleva vastus muuttuu äärettömäksi sen jälkeen, kun elektroninen ohjausyksikkö on poistettu, silloin joko elektronisen ohjausyksikön liitinvastus, jota ei ole irrotettu, on vaurioitunut, tai elektronisen ohjausyksikön CAN-väylän johdossa on katkonainen vika.